 |
PandA-2024.02
|
|
PandA-2024.02
|
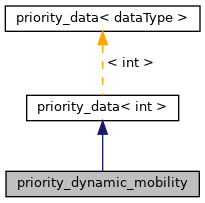
This is a specialization based on mobility. More...
#include <priority.hpp>

Public Member Functions | |
| priority_dynamic_mobility (const ASLAPRef &aslap, const OpVertexSet &_ready_nodes, unsigned int _ctrl_step_multiplier) | |
| Constructor. More... | |
| bool | update () override |
| This specialization does update the priorities at the end of the control step only of ready nodes. More... | |
 Public Member Functions inherited from priority_data< int > Public Member Functions inherited from priority_data< int > | |
| virtual int | operator() (const vertex &_a) const |
| Return the priority associated with the vertex. More... | |
| virtual int & | operator[] (const vertex &_a) |
| return the priority associated with the vertex. More... | |
| virtual | ~priority_data ()=default |
| Destructor. More... | |
Private Attributes | |
| const OpVertexSet & | ready_nodes |
| set of ready vertices. More... | |
| unsigned int | ctrl_step_multiplier |
| multiplier used to take into account chaining during asap/alap computation More... | |
This is a specialization based on mobility.
The update function does change the priority at the end of the control step analysis only of ready nodes.
Definition at line 126 of file priority.hpp.
| priority_dynamic_mobility::priority_dynamic_mobility | ( | const ASLAPRef & | aslap, |
| const OpVertexSet & | _ready_nodes, | ||
| unsigned int | _ctrl_step_multiplier | ||
| ) |
Constructor.
Note that usually high priority in list based means low mobility.
Definition at line 72 of file priority.cpp.
References from_strongtype_cast(), and priority_data< int >::operator[]().

|
overridevirtual |
This specialization does update the priorities at the end of the control step only of ready nodes.
increase priority
Implements priority_data< int >.
Definition at line 93 of file priority.cpp.
References ctrl_step_multiplier, priority_data< int >::operator[](), and ready_nodes.

|
private |
multiplier used to take into account chaining during asap/alap computation
Definition at line 143 of file priority.hpp.
Referenced by update().
|
private |
 1.8.13
1.8.13